


■2cmまでのスキャナーの精度■最大260mまでの測定範囲■最大480000ポイント/秒のスキャン速度
特徴
仕様
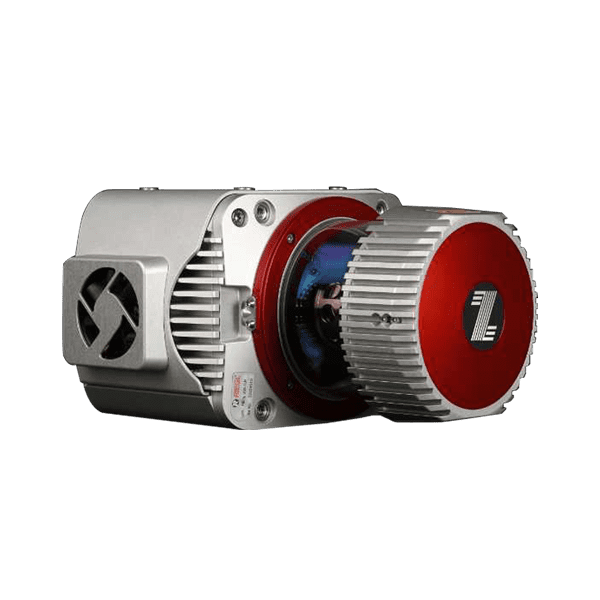
地形スキャンシステム LiDAR SZT-V100の特徴
| 飛行高度 | ポイント密度(SZT-V100 / SZT-V200) | カバレッジ予測 | |
| フライトごと (SZT-V100 / SZT-V200) | 1日ごと (SZT-V100 / SZT-V200) | ||
| 40m | 165~231 / 276~546 pts/sq.m | 0.13 / 0.372 sq.km | 1.3 / 3.72 sq.km |
| 55m | 120~168 / 198~396 pts/sq.m | 0.20 / 0.512 sq.km | 2.0 / 5.12 sq.km |
| 70m | 94~132 / 156~312 pts/sq.m | 0.35 / 0.651 sq.km | 3.5 / 6.51 sq.km |
| 90m | - / 121~242 pts/sq.m | - / 0.837 sq.km | - / 8.37 sq.km |
| 120m | - / 91~182 pts/sq.m | - / 1.116 sq.km | - / 11.16 sq.km |
注:上記のデータは、ジョブの参照のみを目的とした平坦な地形条件に基づいています。1日あたりの推定カバレッジは合計10回のフライトで計算されています。高台や植生帯の複雑な地形は作業効率を低下させる可能性があります。同じレーザー放射パワーの場合、ポイント密度は、ターゲットの反射距離と反射率、キャリアの移動速度、および通気性によって大きく異なります。カスタマイズされたフライトプランを使用すると、より高いポイント密度が可能になります。フライト数を増やすと、より大きなカバレッジの数値が期待できます。
| スキャン速度 | 1日に可能なスキャン距離 | |
| 1-3 lanes | 4-6 lanes | |
| 18 km/h | 108 km | 54 km |
| 36 km/h | 216 km | 108 km |
| 54 km/h | 324 km | 162 km |
注:行間隔の数値は運転速度によって計算され、走行距離の効率は運転速度に応じて6時間の有効なモバイルスキャンから生成されてます。無線データリンクの半径が25kmを超える場合は、地上基地局を次の場所に移動することをお勧めします。交通量が多い道路や、双方向の途中にグリーンベルト/隔離ガードレールがある道路の場合、以前のオクルージョンによるデータギャップを埋めるために複数のドライブを実行する必要があります。
■点群トリミング
(グリッド、ファサード、レイヤー、立面図などでトリミング)
■点群の精度制御
(コントロールポイントの入力とタイポイントのマッチングによる修正)
■点群レンダリング
(色を付けて、セグメント、密度、標高、時間などを分類)
■点群ブラウジング
(大量データの超高速ローディング)
■3次元測定
(座標、距離、音量など)
■ベクトル化されたマッピング
(さまざまな地上オブジェクトをマッピングするための簡単な抽出)
■オーバーレイパノラマでの測定
(鮮やかなパノラマビューでの直接測定)
■GoogleEarthでの3Dビュー
(地理空間表示のためにGoogleEarthにアクセス可能)
地形スキャンシステム LiDAR SZT-V100の仕様
|
SZT-V100 |
|||
| 画像 |
|
|||
| LiDARシステム | レーザーチャンネル | 16チャンネル |
||
| レーザー距離 | 最大 100メートル |
|||
| 視野 | +15.0° to -15.0° (30°) (Vertical); 360° (Horizontal) |
|||
| 角度分解能 | 2.0°(垂直); 0.1°から0.4°(水平/方位角) |
|||
| 最大 平均レート | シングルリターンモード:〜300,000ポイント/秒 |
|||
| 正確さ | 相対精度:5cm; 絶対精度:10cm |
|||
| カメラの有効ピクセル | 24.3 MP, RGB |
|||
| 推奨スキャン高さAGL | 10-80 m |
|||
| 正味重量 | 1.5 kg(カメラなし) |
|||
| 寸法 | 116.5 x 112 x 123 mm |
|||
| 入力電圧 | 11〜18 V DC |
|||
| 消費電力 | 20W |
|||
| データストレージ | 256 GB SSD |
|||
| パートI:レーザースキャナー | タイプ | ベロダインVLP-16 |
||
| 波長 | 903 nm |
|||
| 目の安全クラス | -- |
|||
| レーザー製品の分類 | クラス1アイセーフ-IEC60825-1:2007&2014に準拠 |
|||
| レーザーパルス繰り返し周波数 | -- |
|||
| 範囲精度 | 最大±3cm(標準) |
|||
| 精度/精度 | -- |
|||
| 回転速度 | 5 Hz〜20 Hz |
|||
| スキャン速度 | -- |
|||
| マルチエコー効果 | 2エコーリターン |
|||
| データストレージ | -- |
|||
| 環境保護 | IP67 |
|||
| 温度 | 動作時:-10°C〜60°C; 保管:-40°C〜80°C |
|||
| パートII:POSシステム | タイプ | Inertial Labs INS-D-OEM |
||
| ジャイロスコープバイアス実行中の安定性 | 1度/時間(RMS、アランバリアンス) |
|||
| ジャイロスコープの測定範囲 | ±450度/秒 |
|||
| 加速度計の測定範囲 | ±8g |
|||
| 後処理ロール/ピッチ正確度 | 0.006 deg RMS |
|||
| 後処理のインデックス正確度 | 0.03 deg RMS |
|||
| 後処理位置H / V正確度 | 0.005/0.01 meters, RMS |
|||
| 後処理速度H / V正確度 | 0.02/0.01 meters/sec, RMS |
|||
| データサンプリングレート | IMU: 200 Hz, GNSS positions: 5 Hz |
|||
| 内部メモリ | -- |
|||
購入・お問い合わせ |
型番:SZT-V100 |
|||
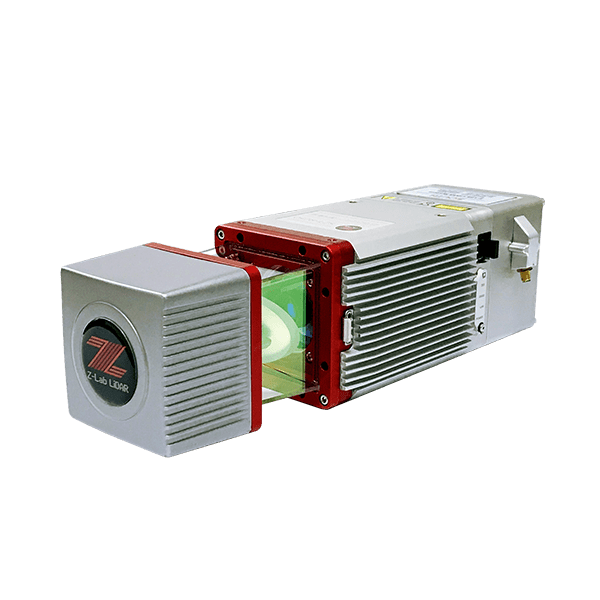
■2cmまでのスキャナーの精度■最大260mまでの測定範囲■最大480000ポイント/秒のスキャン速度
■5cmまでの絶対精度■軽量 2.1 kg、最大250mの作業範囲■マルチプラットフォーム(UAV / SUV / ATV)対応
■5cmまでの絶対精度■軽量 2.1 kg、最大330mの作業範囲■マルチプラットフォーム(UAV / SUV / ATV)対応
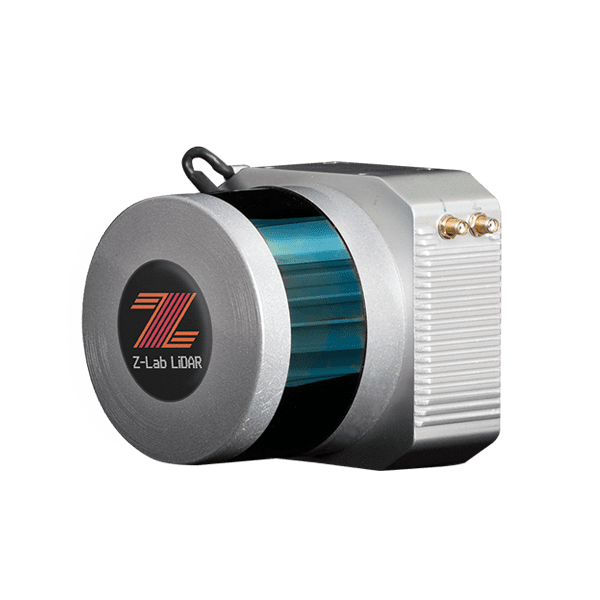
■10cmまでの絶対精度■軽量 1.5 kg■マルチプラットフォーム(UAV / SUV)対応
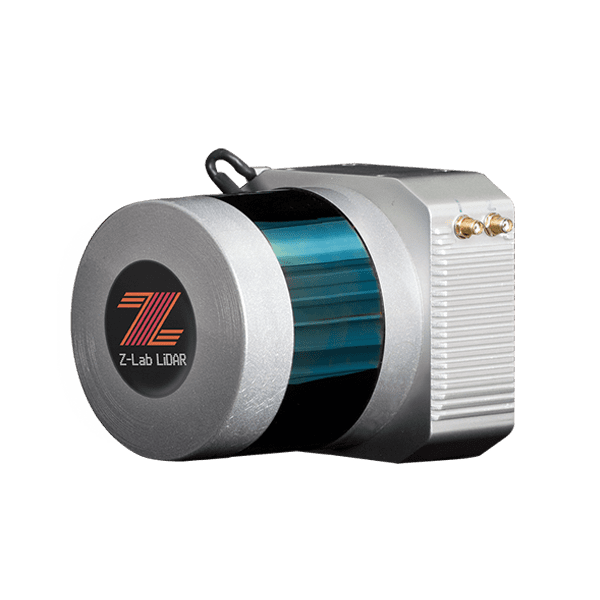
■10cmまでの絶対精度■軽量 1.5 kg■マルチプラットフォーム(UAV / SUV)対応
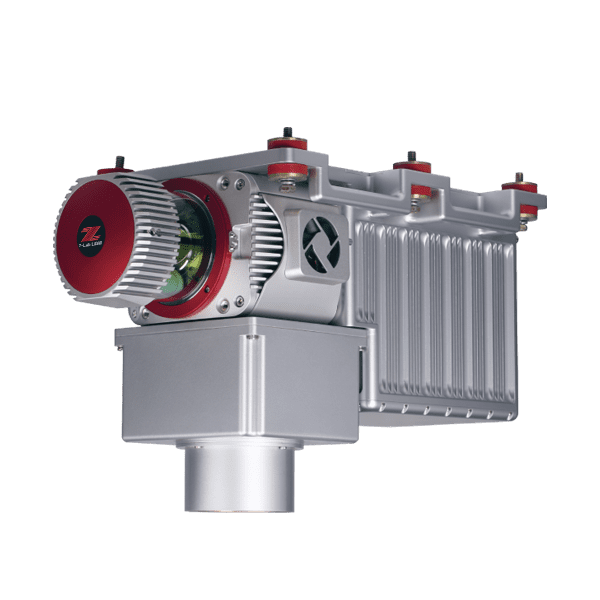
■最大動作範囲1350m■1日あたり最大600kmの自動車によるスキャン■1日あたり最大960平方キロメートルの空中スキャンカバレッジ■SUV/ヘリコプター/ATV/船舶に対応するマルチプラットフォーム
■コンパクトなデザインの超軽量ユニット■正確な地形のために統合された測量グレードのセンサー■豊富な出力に利用できる完全なソフトウェアキット■現場で実証済みのソリューションとプロジェクトベースの背景

地下鉄または高速鉄道当局に地下鉄道トンネルのスキャンと検出のワンストップソリューションを提供します。1kmの地下鉄トンネルを定期的に検査する場合、数時間以内に大量のデータ結果を取得可能
■構造安定性■モジュール化設計■産業用グレードのタブレットPC■長期間稼働■安定したコミュニケーション■低摩耗性■高い安全性■高速測定■精密測定

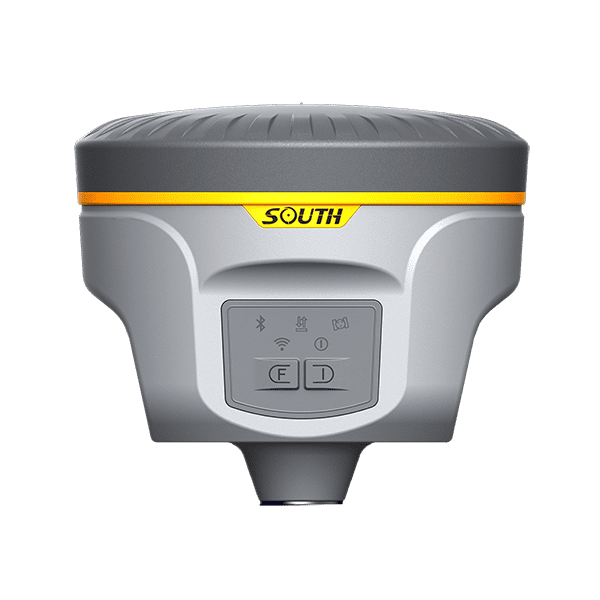
■インテリジェントプラットフォーム■Linux OS■WebUI管理プラットフォーム■無線データ通信■Wi-Fi■ブルートゥース■NFC■データリンク■内蔵の機能的なデジタルラジオ■内蔵ネットワークモジュール■インテリジェントテクノロジー■ストレージテクノロジー■デュアルバッテリーシステム■iVoice■スマート電柱供給技術
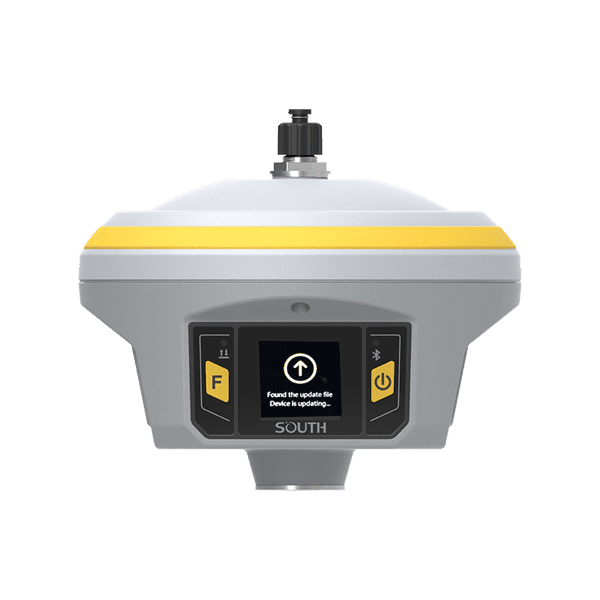
■インテリジェントプラットフォーム■Linux OS■WebUI管理プラットフォーム■無線データ通信■Wi-Fi■ブルートゥース■NFC軽いタッチでうまくペアリングできるので、接続がより速く、より便利になります。■データリンク■内蔵の機能的なデジタルラジオ■内蔵ネットワークモジュール■インテリジェントテクノロジー■ストレージテクノロジー■デュアルバッテリーシステム■iVoice■スマート電柱供給技術
5G ネットワーク ■ビッグデータ時代への高速通信■FarLinkプロトコル■15 KM■タッチスクリーンの相互作用■Slink&RTK XTRa■「高速」IMU■64GB SSD■RTK2
5G ネットワーク ■ビッグデータ時代への高速通信■FarLinkプロトコル■15 KM■タッチスクリーンの相互作用■Slink&RTK XTRa■「高速」IMU■64GB SSD■RTK2
■Android 8.1 ROM:64GB■5インチサンライトタッチスクリーン■フルキーパッドによる高速入力■9200mAhの大容量バッテリー搭載■デュアルSIMカードスロット(4G)■NFC、ジャイロスコープ、Eコンパス、Gセンサー等さまざまなセンサー類を装備■動作範囲はBluetooth 4.1で最大20メートル、WiFiは最大30メートル
H5は、Androidで実行される新世代のプロフェッショナルコントローラーであり、最先端のスマートフォン機能と堅牢なプロフェッショナル品質を兼ね備えています。また、測量士のフィールドワークに柔軟性を与える英数字キーパッド。
測量士のための包括的なオフィスソフトウェア SGO(SOUTH GEOMATICS OFFICE)■新しい高速処理エンジン■PPK処理■データ品質分析■マルチフォーマット■新しいアルゴリズム■CAD結果の作成■EGM■クラウド送信■ベースマップ機能■ネットワーク調整

N80シリーズは高精度GNSSボード、高感度アンテナ、4Gネットワークモデム、WiFi、デュアルモードBluetoothモデムを備えた産業用の頑丈なGNSS収集端末であり、大画面マッピングの分野をリードするポータブル高精度タブレットです。

N80シリーズは高精度GNSSボード、高感度アンテナ、4Gネットワークモデム、WiFi、デュアルモードBluetoothモデムを備えた産業用の頑丈なGNSS収集端末であり、大画面マッピングの分野をリードするポータブル高精度タブレットです。

■大画面ディスプレイ・解像度1200×1920HDによる究極の視覚体験■OSにAndroid8.1を搭載!オクタコア3.0GHz、4GBのRAMと64GBのストレージ■超薄型ボディでありながらIP67の防塵・防水性に適合■長時間稼働を実現する大容量9000mAhバッテリーはメンテナンス可能な取り外しタイプ■ユニークで使いやすい磁気サポートリストバンドデザイン■豊富な周辺機器インターフェースとアプリケーション■アプリケーションをすばやく切り替えるための複数の物理ボタンを搭載

超高耐久性タブレットHR842はMicrosoft Windows10と、4GBのRAM、64GBのフラッシュベースのストレージによって、オフィスでの作業に必要なすべてのアプリケーションを実行できます。

最新の超高耐久性タブレットHR1160BはMicrosoft Windows10と、8GBのRAM、128GBのフラッシュベースのストレージによって、オフィスでの作業に必要なすべてのアプリケーションを実行できます。

■高精度の測位、GPS、GLONASS、BD衛星、内蔵衛星アンテナをサポートし、マルチパス除去技術と干渉防止技術を備えています。

■高精度の測位、GPS、GLONASS、BD衛星、内蔵衛星アンテナをサポートし、マルチパス除去技術と干渉防止技術を備えています。

■Androidユーザーのニーズを満たす大型5インチHDタッチスクリーン■Androidバージョンは複数の言語をサポート■クアッドコア1.3GHzプロセッサ■microUSBポートとOTG機能■レーザーセンタリングコンポーネントを搭載■複数のセンサーと、拡張された機能

■小型・薄型・軽量筐体■安定動作と優れたパフォーマンス■GPS、Glonass、BDS、SBAS のサポート■様々な用途に向けたプロフェッショナルソフトウェア■SDK・二次開発に対応

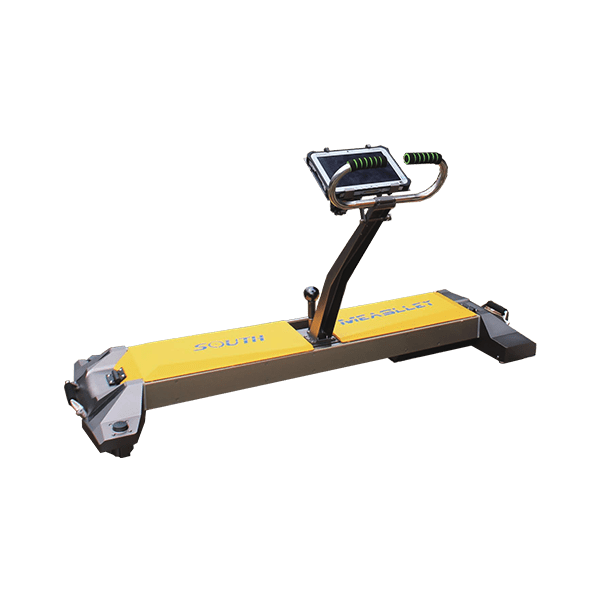
■SU12測量船は小型軽量で優れた水路測量装置となり、現場への持ち運びに非常に便利■ADCP(超音波流速計)、音響測深機、RTK受信機などの機器を搭載■手動リモコンでコントロールセンターから約2km離れたところまで航行

■デュアル周波数デジタル音響測深機■デュアル周波数デジタル音響測深機■組み込みのWindowsXPオペレーティングシステム、ユーザーフレンドリーなインターフェイス■産業レベルでコンピューターと音響測深機の両方と統合され、しかも低消費電力■フルアルミニウムハウジング、コンパクトで便利、特に理想的とは言えない状況
■WindowsXPエンベデッドOS、ユーザーフレンドリーなインターフェイス■コンピューターと音響測深機が統合、低消費電力を実現■フルアルミ製ハウジング、コンパクト、過酷な環境でも利用可能

■統合されたプロフェッショナルOEMボード■アルミニウム合金ハウジングのまったく新しいデザイン■IP67標準の産業レベルに組み込まれています■WIFIホットスポットとBluetoothを接続してアクセスできます■STHとRINEXを含むマルチフォーマットの生データストレージ■eMMCストレージテクノロジーを採用

■ミリメートル以下のレベルで安定したフェーズセンターオフセットを提供。■リファレンス・ステーションの優れたトラッキング性能を保証。■チョークリングアンテナ設計。■卓越したマルチパスリジェクションを実現。■低高度追跡用の高ゲイン設計。■多くの衛星衛星信号を利用可能に。■100メートル超のケーブル接続でも伝達可能な超低ライン損失。■密閉されたコアコンポーネント。■屋外での過酷な条件に耐え、継続利用を可能にする防水・防塵設計。
■オールインワンデザイン■盗難防止設計■IP68■リモコン■クラウドサービスの監視■複数のコミュニケーションをサポート

■webUIにログインして、リアルタイムの監視データを確認します■Excelレポートとグラフィックエクスポート■複数のアラートシステム、SMS、電子メール、その他のセンサー■24 * 7 * 365の安定した動作システム■ワイヤレスデータ送信■ソーラーパネル電源■3番目のサポートパーツセンサー

■1”/ 2”精度、1000mリフレクターレスEDM■3.5インチLCDタッチスクリーン■Bluetoothによるワイヤレス接続■オートレベルとガイドライト(オプション)■ターゲット照準および記録用カメラ(オプション)

■1”/ 2”の精度、最大2000mの非プリズムEDM■0.3秒での超高速測定■WinTS、WinEG、WinMGソフトウェアを搭載したWindows CE 6.0■ワイヤレスBluetoothによるケーブルフリー接続

■1”/ 2”の精度、最大2000mの非プリズムEDM■0.3秒での超高速測定■WinTS、WinEG、WinMGソフトウェアを搭載したWindows CE 6.0■ワイヤレスBluetoothによるケーブルフリー接続

■2インチの角度正確性■プリズム不使用で1000mのロングレンジEDM■シンプルかつ実用的なオンボードソフトウェア■見やすい液晶画面■USB・Bluetoothによる簡単な接続

改善されたEDMシステム。最大600mの無反射範囲と5.0kmのシングルプリズム範囲。新しい光路変更、発光と反射信号を完全に分離。最適化されたアルゴリズム、0.3s未満の測定速度。

最初のAndroidトータルステーション A1は、サードパーティのソフトウェアで利用できるオープンインターフェイスを備えています。独自のリクエストに基づいてカスタマイズされたソフトウェアで利用できます。マルチタッチテクノロジーを備えた5.0インチの容量の大きい画面で、操作がすばやくスムーズに行えます。

■2インチの精度、1000mのリフレクターレスEDM■3.0インチの大型で高解像度のディスプレイ■すばやく簡単なトリガーキー■自動高さで時間を節約■杭打ち用の内蔵ガイドライト

■最大1500mのリフレクターレスEDM■Android6.0でのインテリジェントなワークフロー■大型の高解像度ディスプレイ■Bluetoothによるケーブルフリー接続■直感的なオンボードソフトウェア-SurveyStar&Map Star

■1000m可視ポインターとピンポイント精度(≤4cm/ 1000m)■1000m超長距離レーザー■最大2インチの精度■クリア&大型液晶ディスプレイユニット■パイプジャッキアプリケーションを完了するように設計されています

多機能セオドライト NT-023 ■プロジェクトを実行するときのポイントの位置に基づいて、関係する軸を選択して配置することができます。■この強力な軸ステークアウト機能により、NT-023は簡単な方法で正しいステークアウトポイントを見つけるのに最適。

■電子/レーザーセオドライト■高度なEDM設計■レーザー下げ振りおよびレーザーポインター機能■可動トライブラッハ■競争力のあるパフォーマンス

■電子/レーザーセオドライト■高度なEDM設計■レーザー下げ振りおよびレーザーポインター機能■可動トライブラッハ■競争力のあるパフォーマンス

デジタルレベル DL-2003A ■強力なソフトウェア処理機能■色んなデータフォーマットのシームレスな転送■水平、垂直制御ネットワークおよび角度方向調整の動的調整ルーチン機能があります。■簡単にズームインまたはズームアウト機能で全体的なデータがグラフィックで表示されます。

■用途の広いオンボードプログラム■幅広いアプリケーション■トリガーキーによる測定と記録■照明付き4ラインLCDディスプレイ■使いやすいオンボードプログラム

DSZ シリーズ プロ版用 ■長距離観察のための超クリアレンズ■新開発された磁気減衰補償器■極端な温度で高い性能と信頼性■優れた耐衝撃性能■トップ防塵防水のIP65規準

NL シリーズ ■強化磁気/空気減衰補償器■優れた耐衝撃機能■実用的な防塵&防水機能■高いコストパフォーマンスと耐久性製品特性■特許取得済みの空気減衰補償装置

NL シリーズ ■強化磁気/空気減衰補償器■優れた耐衝撃機能■実用的な防塵&防水機能■高いコストパフォーマンスと耐久性(NL32G本体+三脚+アルミスタッフ)

NL シリーズ ■強化磁気/空気減衰補償器■優れた耐衝撃機能■実用的な防塵&防水機能■高いコストパフォーマンスと耐久性

DSZ2のオプション ■DSZ2+FS1で測定精度が0.5mmに高めに

■-30 / -40mmオフセットと64mmプリズムTY06、アルミニウムコーティング、ABS製の赤いキャニスターで密封■取り付けベースは、ABSホルダー付きの標準メス5/8スレッドを備えています■キャリーバッグAB20が含まれています

■-30mmオフセットと64mmプリズムTY01を備え、精度<5秒、耐久性のあるABS製の黄色いキャニスターで密封■取り付けベースは、亜鉛アルミニウムホルダーTK11を備えた標準のメス5/8スレッドを備えています■キャリーバッグAB09が含まれています

■アルミニウム合金ホルダーに入れられた25.4mmプリズム、0 / -30mmオフセット■取り付けベースは標準の5/8ネジを備えています■調整可能な15 'サークルバイアル■ソフトバッグAB02、コネクタAD013 / AD014、Sフックが含まれています

■25.4mm銅コーティングプリズムを金属ホルダーに取り付け、防水■防塵保護を実現■114A用3インチLバー■傾斜ネジは8mm六角レンチで緩め締め

SOUTH社 多機能セオドライト トータルステーション用 アルミニウム三脚 ATS-3